Projects
Bayesian Safe Set Inference
 Given a parameterized system for which only a subset of the parameter space is “safe” for testing, we compute the element of the safe set, S, which maximizes the expected value of a probabilistic worst-case goodness metric at a point, p*, outside the safe set.
Given a parameterized system for which only a subset of the parameter space is “safe” for testing, we compute the element of the safe set, S, which maximizes the expected value of a probabilistic worst-case goodness metric at a point, p*, outside the safe set.
Integrated Model of Drosophila flight 
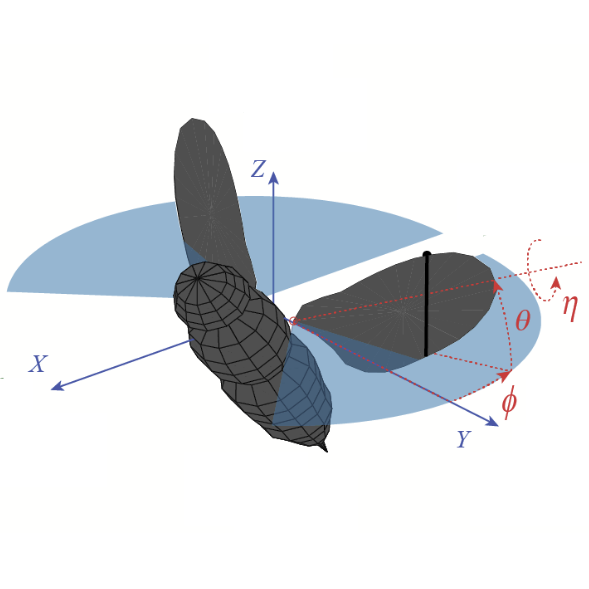 By aggregating low-order fluid models, an empirically derived basis set of flight control maneuvers, and high-speed video validation data, we generate a modular simulation of controlled flight dynamics for the fruit fly Drosophila melanogaster.
By aggregating low-order fluid models, an empirically derived basis set of flight control maneuvers, and high-speed video validation data, we generate a modular simulation of controlled flight dynamics for the fruit fly Drosophila melanogaster.